みなさまこんにちは、前回指名されました2年ハード班のかみです。
今日は、自分の担当したとうロボのロボットをハード班の視点から少し紹介したいと思います。
まず、「とうロボ」って何?という話を、簡潔に説明いたします。
「とうロボ」は「東海地区交流ロボコン」の略称で、NHKロボコンに向けて東海地区のロボコンサークルのレベルアップを図ろう!ということで毎年夏休みに開催している大会です。
とうロボは今年で2回目の開催で、名古屋工業大学さんや豊橋技術科学大学さんや岐阜大学が中心となって学生の間で自主的に開催されています。
詳しくはとうロボの公式ページに書いてありますのでそちらをご覧ください(´∀`)
早速ですが、こちらが自分が担当したロボットの「稲葉貴志 mkII」です。
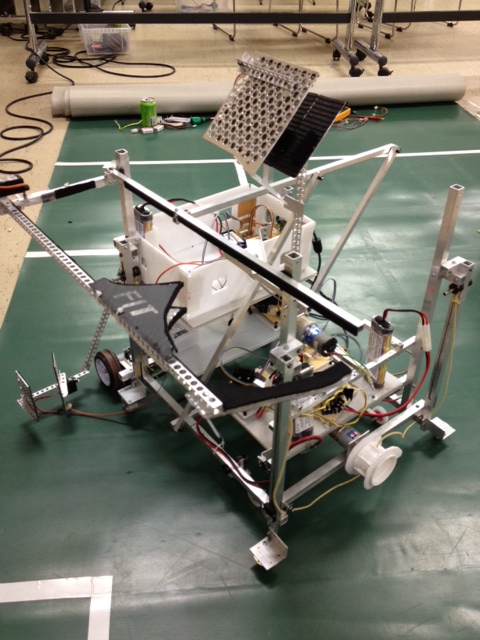
2本のアームで地面に置いた3本の缶を、中央についた平行並行リンクアームで95cm先にある3つのバケツを一気にとることができたり、20cmの段差を乗り越えたりできる素敵なロボットです。
ソフト班2年1人、ハード班2年2人+1年1人の計4人がメインとなって制作しました。
さて、少し技術的な話になりますが今回はロボットの設計について紹介します。
当サークルでは、ロボットの設計に3DCAD(製図ソフト)のSolidWorksを使用しています。
SolidWorksを選んだ理由はいくつかありまして、
①年間約1万円という低価格で学生版を自分のPCで使うことができる
②学生版でも解析ソフトを利用することができる
③大学が採用していて授業でも使用するため、サークルに扱える人が多い
などの理由があります。また、便利な時代になったものでクラウドサービスなどと組み合わせることにより大学や家などいつでもどこでも、部員同士で協力しながら設計を進めていくことができます。
3DCADなので、実際にロボットを組み立てるように簡単に画面上で部品を配置していくことができます。
実際にロボットを作る前に部品同士の干渉に気付けたり、手計算だと泣きたくなるような重量の計算だとか、たわみや応力の計算などが簡単にできるので、ここだけの話ズボラなハード班としては非常に重宝しています(;´Д`)

画像は、SolidWorksの解析の機能を使ってバケツを取る平行リンクアームの強度計算をしてみたものです。
そして出来上がったアセンブリがこちら。
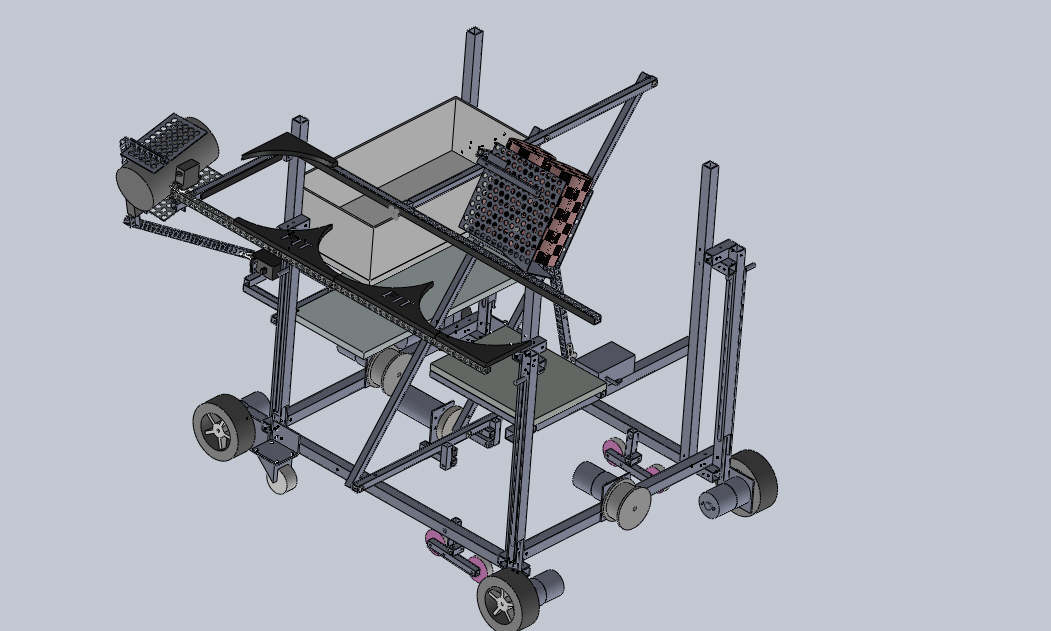
実物とほぼ一緒。(のはず)
画像なんでわかりにくいですが、これちゃんと画面上でアームとか実際と同じように動くんです(*´∀`)
他の部員に自分が作ろうとしているものを一発で理解してもらえます。
でもまだ、自分が知らないだけの便利な機能はたくさんあると思うので、これからもっともっと勉強していかなくては(‘A`)
長くなりましたが、ここまで読んでいただいた方ありがとうございました。
設計以外のハードのことはきっと他のハード班の人がまた記事を書いてくれるはず!
以上、長文には慣れていないハード班かみでした(´∀`)
次にブログを更新してくれるのは、最近頑張って回路の勉強をしているらしいソフト班1年のかとすんです♪
P.S. 現在サークルの活動内容を紹介するポスターを私かみが制作しているので、出来次第また掲載します(`・ω・´)
0 件のコメント:
コメントを投稿